Im zweiten Teil meiner Artikelserie geht es nun darum, wie man den Raspberry Pi Roboter zusammenbauen kann. Das Roboter Chassis wird ohne Anleitung ausgeliefert, man findet im Internet aber schnell ein Wiki und auch diverse Youtube Videos.
Raspberry Pi Roboter zusammenbauen
Diese Anleitung bezieht sich zwar auf meinen Cherokey Bausatz, kann aber bis auf wenige Ausnahmen auch auf viele andere Roboter Chassis angewendet werden, denn diese sind von den Teilen oft identisch. Das wichtigste und entscheidende Kriterium für mich war, dass man die Motoren auch über den Raspberry Pi ansteuern kann. Deshalb war der erste Schritt zu sehen, ob man den Raspberry Pi überhaupt auf der Platine anschrauben kann.
Raspberry Pi befestigen
Die Platine des Cherokey Mobile 4WD Bausatzes ist sehr speziell. Die enthält mehrere Löcher für Kabel, einige zur Befestigung zusätzlicher Hardware wie ein Akkufach am Boden und ein Controller Board auf der Oberseite. Die Bohrungen sind unter anderem für den Arduino vorgesehen. Der große Vorteil des Boards ist, dass es Motor Driver für die 4 Motoren enthält und deshalb keine weitere Hardware erforderlich ist.
Die Montage vom Raspberry Pi war recht einfach, er ist über 2 Abstandsbolzen am Board angeschraubt, 2 weitere dienen dazu, dass der Raspberry Pi auf dem Board darunter aufsitzt. Diese Montage ist zwar nicht perfekt, für meine Zwecke aber ausreichend. Der Pi wackelt nicht und sitzt recht fest.
Auf dem Board befinden sich folgende Hardware:
- 6 Stützen (weißes Plastik) um darauf eine weitere Platine anzubringen
- Ein-Ausschalter für das Board und in Folge für die Motoren (nicht für den Pi!)
- einen Ausgang um einen Arduino mit Strom zu versorgen – dieser wird von mir nicht genutzt
- 4 Anschlüsse für die Motoren – die Kabel werden durch die Löcher im Board geführt
- GND und 5V Pins für diverse zusätzliche Hardware – beispielsweise weitere LED Lichter oder Sensoren
- 4 Anschlusspins für die Motorsteuerung und ein RX und TX Pin
- LED Lichter um das Board herum – damit das ganze cool aussieht
Ansteuerung der Motoren
Die Motoren können über die 4 Pins D4, D5, D6 und D7 angesteuert werden. Die Platzierung vom Raspberry Pi passt perfekt, die GPIO Pins liegen nicht weit entfernt und können einfach über female-female Steckdrähte angeschlossen werden.
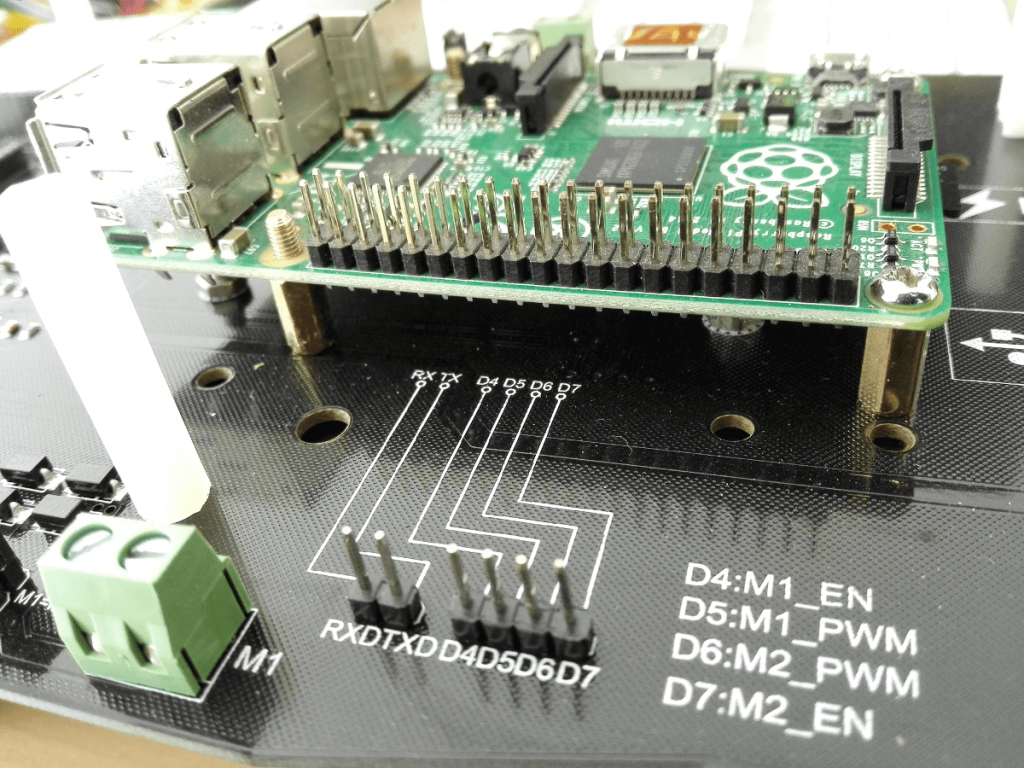
Besonders wichtig war für mich, dass die Kabel nicht über das ganze Board verteilt liegen, denn schließlich möchte ich mit dem Raspberry Pi nicht nur die Motoren steuern. Der Roboter soll neben seiner Mobilität auch andere Aufgaben erfüllen. Nach Möglichkeit sollen alle GPIO Pins für irgend etwas verwendet werden.
Wie man die GPIO Pins verbindet und mit welchem Source Code man den Roboter steuern kann zeige ich in einem der folgenden Artikel. Es sei zumindest soviel gesagt, dass D4 die Richtung der Motoren auf einer Seite angibt (vor oder zurück) und D5 die Geschwindigkeit. Das selbe dann noch einmal mit D6 und D7 auf der anderen Seite.
Fazit
Beim Raspberry Pi Roboter zusammenbauen ist mir gleich aufgefallen, dass der Raspberry Pi am Board befestigt werden kann. Meine größte Sorge ist somit verflogen. Das Board mit dem Raspberry Pi ist soweit einsatzbereit im nächsten Teil zeige ich euch wie ich den Rest, also die Motoren, Räder und das Chassis montiert habe. Den Rest vom Roboter zusammenbauen ist dann mit handwerklichen Können kein Problem.
Wer von euch steuert mit dem Raspberry Pi auch Motoren? Welche GPIO Pins verwendet ihr?
Teil 1 | Teil 2
Raspberry Pi Roboter zusammenbauen
Keine Kommentare:
Kommentar veröffentlichen